

電 話(huà):010-82895362
傳 真:010-82894577
郵 箱:vision2010@cnimage.com
地 址:北(běi)京市海澱區上地信息路1号國際科技創業園1—1705
機器人視覺引導定位技術被廣泛運用于機器人工(gōng)業制造中(zhōng),目的在于提升機器人在作業中(zhōng)的精準性與穩定性。傳統機器人因爲缺乏定位系統,無法準确識别産品所在方向,在産品的抓取、放(fàng)置作業中(zhōng)經常出現誤差,不能精準地抓取産品。
雙目視覺立體(tǐ)方法采用兩台相機從不同的位置獲取被測物(wù)體(tǐ)的兩幅圖像,通過計算兩幅圖像對應點間的位置偏差,來獲取被測物(wù)體(tǐ)三維幾何信息的方法。該項技術在機器人視覺、車(chē)輛自主駕駛、多自由度機械裝置控制、非接觸自動在線檢測等領域均具有很大(dà)的應用價值。 三維重建一(yī)直是計算機視覺的重要研究領域之一(yī)。
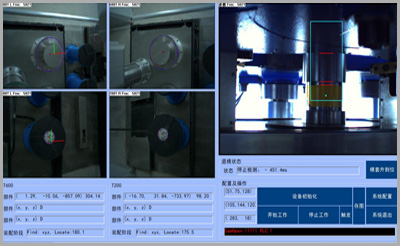
北(běi)京盈美智研發設計的雙目視覺立體(tǐ)定位軟件已成功應用于磨具裝配行業。該系統采用兩套雙目相機(SM1左、SM1右、SM2左、SM2右)對空間中(zhōng)的上模具,中(zhōng)模具,下(xià)模具進行定位,告知(zhī)機械手系統它們的三位坐标(x,y, z),機械手根據坐标完成三模具的裝配工(gōng)作。
雙目視覺立體(tǐ)定位軟件
一(yī)、主界面,主要包括圖像顯示、坐标顯示、程序操作等。
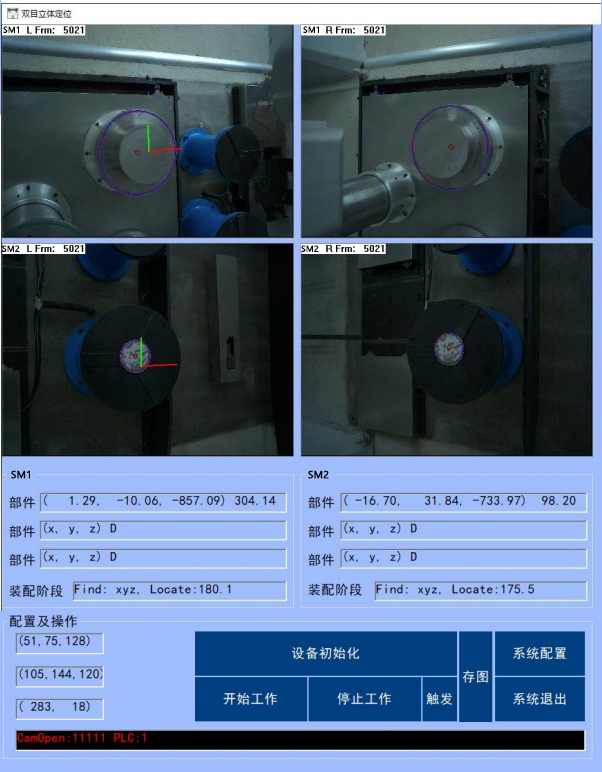
主界面
二、系統配置,主要包括相機配置、相機标定、定位配置、通訊配置、雜(zá)項配置。
三、相機配置,包括仿真模式選擇、手動采集模式選擇、采集間隔、相機選擇、工(gōng)作模式、曝光時間、相機增益、白(bái)平衡、ROI區域等,ROI區域可通過直接輸入數值位置設置,也可以通過鼠标操作設置。
四、相機标定,主要包括設備選擇、标定方式、标定參數、添加圖像、标定相機、坐标标定、坐标偏差修正等。
五、定位配置,主要包括色環顔色、邊界策略、圖像縮放(fàng)、匹配精度等。
六、通訊配置。
七、雜(zá)項配置,主要包括繪制最終結果、繪制候選橢圓、繪制候選邊界。
北(běi)京盈美智科技發展有限公司自2000年成立以來,一(yī)直緻力于機器視覺領域,提供圖像處理分(fēn)析、機器視覺應用等全方位解決方案。公司代理銷售國際各大(dà)廠商(shāng)的工(gōng)業相機、圖像采集卡、光源及圖像處理模塊等視覺産品,還可根據用戶的實際要求,進行從硬件到軟件的全套圖像處理系統集成及圖像處理軟件定制服務。

PCI Express 高速工(gōng)業相機xiB-64系列
USB3.0系列工(gōng)業和生(shēng)命科學相機

xiQ USB3.0工(gōng)業相機

Atik Apx60
FireBird Camera Link 圖像采集卡 1xCLD-2PE4

CXP圖像采集卡CLAXON CXP

CoaXPress-12圖像采集卡HawkEye-CXP-12

CAMSIM 仿真卡系列
嵌入式 PCI Express總線CameraLink圖像采集卡系列

CameraLink光纖适配器PHAST系列

Full CameraLink 光纖延長器/适配器PHOX-FM/FL系列

Camera Link /LVDS、RS-422、HD-SDI接口轉換器

Camera Link模拟器

USB3.0自動聚焦液态鏡頭相機

USB迷你微型CMOS工(gōng)業相機
010-82895362
網址:https://www.cnimage.com
郵箱:vision2010@cnimage.com
地址:北(běi)京市海澱區上地信息路1号國際科技創業園1—1705

