

電 話(huà):010-82895362
傳 真:010-82894577
郵 箱:vision2010@cnimage.com
地 址:北(běi)京市海澱區上地信息路1号國際科技創業園1—1705
機器視覺是通過視覺産品(即工(gōng)業相機、圖像采集卡等)将被拍攝的目标轉換成圖像信号,并傳送給專業圖像處理系統,得到目标的形态信息,再将像素分(fēn)布和亮度、顔色等信息轉變成數字信号。随後圖像處理系統對這些信号進行各種運算來提取目标特征,進而根據判别的結果來控制現場裝備的動作。
機器視覺是人工(gōng)智能快速發展的一(yī)個重要分(fēn)支,簡單來說,機器視覺就是用傳感器代替人眼來做檢測和判斷。機器視覺最基本的特點就是可以提高生(shēng)産的靈活性和智能化程度。在一(yī)些不适于人工(gōng)作業的危險工(gōng)作環境或者人工(gōng)視覺難以滿足要求的場合,常用機器視覺來替代人工(gōng)視覺。同時,在大(dà)批量重複性工(gōng)業生(shēng)産過程中(zhōng),機器視覺技術可以大(dà)大(dà)提高生(shēng)産的效率和自動化程度。
作爲智能農業機器人的外(wài)部傳感器,機器視覺是機器人作業裝備的眼睛,是最大(dà)的信息源,具有感知(zhī)信息豐富、采集信息完整等優勢。以下(xià)是機器視覺技術在農業領域的三大(dà)應用:
農業采摘機器人
從農場的每棵樹(shù)上摘水果耗時耗力,這也是水果采摘機器人可以發揮用處的地方。農業采摘機器人的最大(dà)特點之一(yī)是,當它被部署時,所需成本比人力成本要便宜得多。并且,這個系統是快速和高效的,它可在短短的2-3秒内拿起一(yī)個水果。

圖一(yī):基于機器視覺的農業采摘機器人
生(shēng)态無人機
目前無人機在農業領域中(zhōng)的應用越來越廣泛, 無人機搭載複雜(zá)的相機系統,可對土壤地質進行監測研究;也可通過拍攝植物(wù)的高光譜影像,對其葉片進行含氮量分(fēn)析;同時還可測量樹(shù)上水果的含糖量;此外(wài),還可進行農藥噴灑工(gōng)作等等。這種機器人有可能大(dà)大(dà)減少人力成本。

圖二:基于機器視覺的生(shēng)态無人機
園藝機器人
基于機器視覺的園藝機器人使用工(gōng)業相機和3-D映射技術在工(gōng)作過程中(zhōng)可爲自己導航,同時在修剪時将雜(zá)草叢生(shēng)的灌木與理想的最終形狀進行比較。使用不同的切割工(gōng)具,通過精确指出應切割的每種植物(wù)莖的精确部分(fēn)來進行修剪。

圖三:基于機器視覺的園藝機器人

PCI Express 高速工(gōng)業相機xiB-64系列
USB3.0系列工(gōng)業和生(shēng)命科學相機

xiQ USB3.0工(gōng)業相機

Atik Apx60
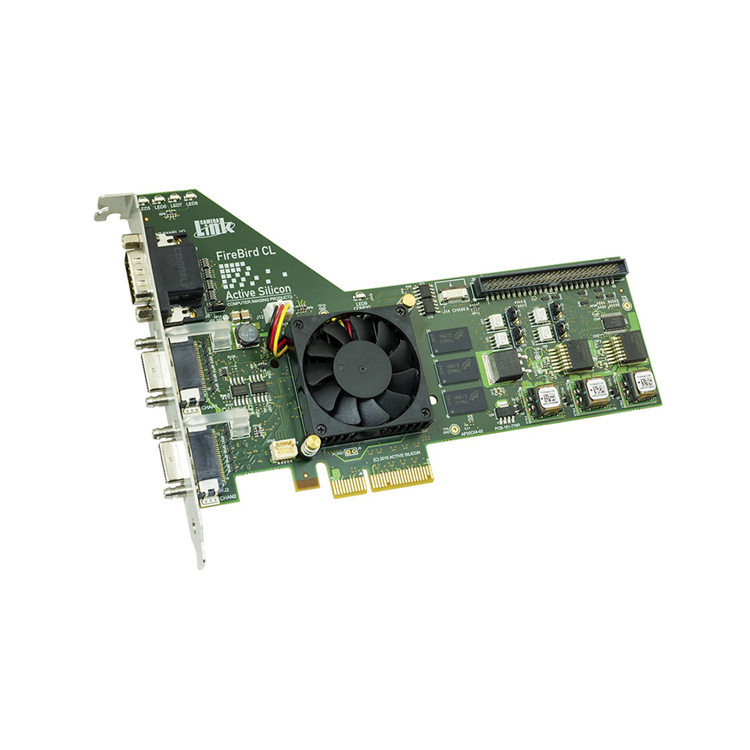
FireBird Camera Link 圖像采集卡 1xCLD-2PE4

CXP圖像采集卡CLAXON CXP

CoaXPress-12圖像采集卡HawkEye-CXP-12

CAMSIM 仿真卡系列
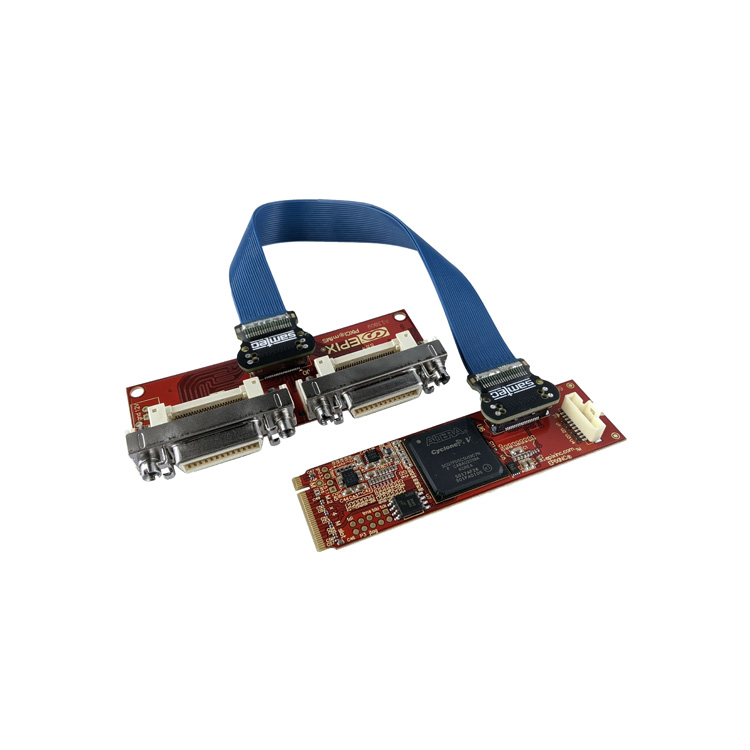
嵌入式 PCI Express總線CameraLink圖像采集卡系列

CameraLink光纖适配器PHAST系列

Full CameraLink 光纖延長器/适配器PHOX-FM/FL系列

Camera Link /LVDS、RS-422、HD-SDI接口轉換器

Camera Link模拟器

USB3.0自動聚焦液态鏡頭相機

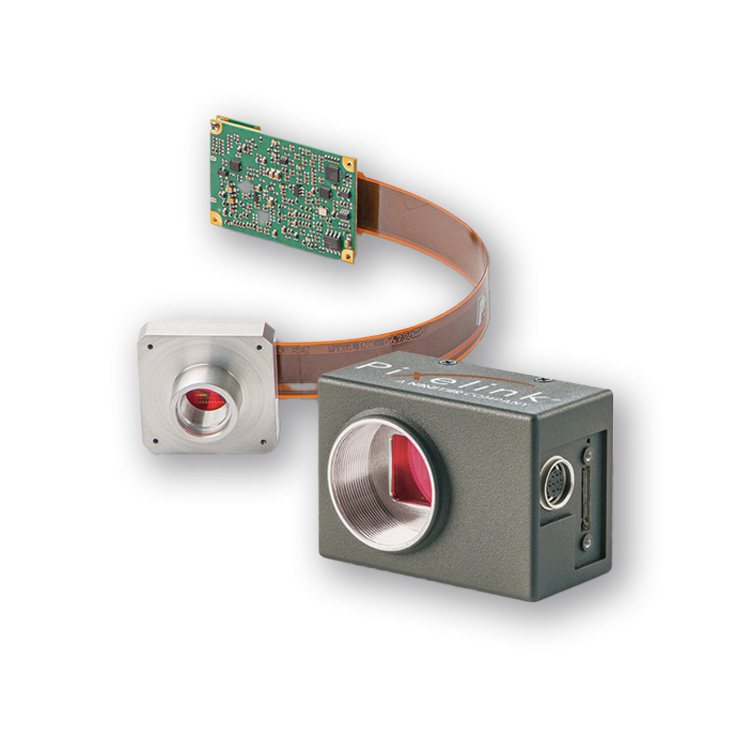
USB迷你微型CMOS工(gōng)業相機
010-82895362
網址:https://www.cnimage.com
郵箱:vision2010@cnimage.com
地址:北(běi)京市海澱區上地信息路1号國際科技創業園1—1705

